四轴无人机研究:第二回
本文继续我们先前的无人机研究
升力从何而来
压强差。因为气流的高速流动,导致桨叶上方压强小于下方,形成压强差抬升飞机。一般四轴无人机斜角方向桨叶一致,两侧相反,负负得正。
几个角度
偏航角,横滚角,俯仰角。方向如何控制的实践,就是让一侧的压力高于另一侧。
电机
无刷电机,空心杯有刷电机
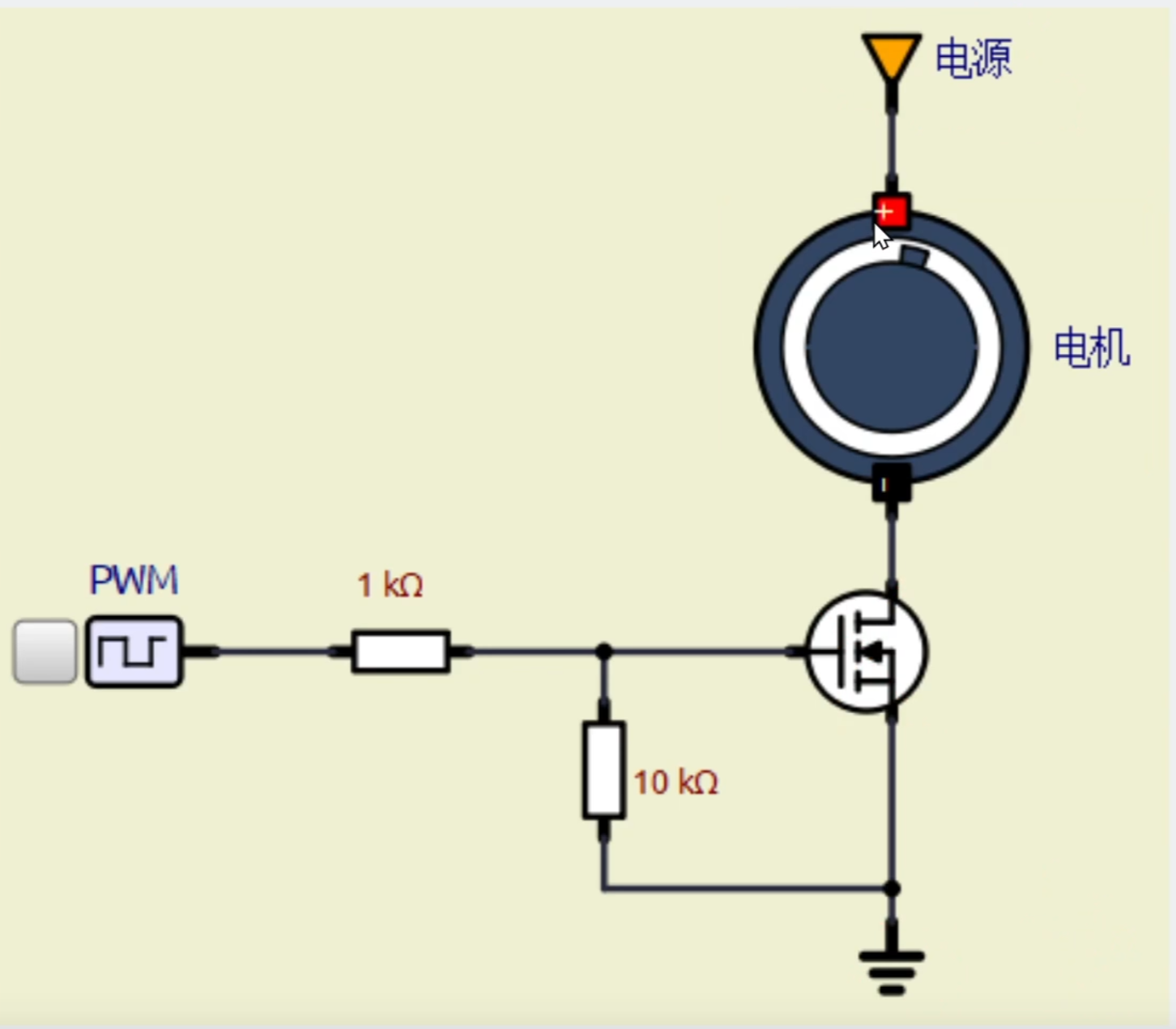
PWM:标准化方波。
电池
如三元锂电池,家用一度电: 1kwh
电源芯片
用来管理充放电
陀螺仪
测量飞行姿态。位于无人机最中间.
通信模块
激光测距仪
遥控器
PID控制算法
反馈控制算法
最后插个题外话
电流供电后,电动机是怎么动起来的呢?感兴趣的可以去了解下
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.